Es un robot de transporte a gran escala con una envergadura de brazo de 2570 mm y una carga máxima de 200 kg.
Parámetro del producto (especificación)
| brazo | J1 | J2 | J 3 | J4 | J5 | J6 |
| Rango | ±160° | -85°/+35° | -80°/+105° | ±180° | ±95° | ±360° |
| máxima velocidad | 57°/S | 52°/S | 52°/S | 70°/S | 75°/S | 99°/S |
Característica y aplicación del producto.
Se pueden instalar diferentes funciones finales para completar el manejo de piezas de trabajo de diferentes formas y estados, lo que reduce en gran medida el trabajo manual pesado de los seres humanos. Ampliamente utilizado en la carga y descarga de máquinas, línea de producción de punzonadoras automáticas, línea de ensamblaje automático, manejo de paletización, contenedores y otros manejos automáticos.
Apilar
Montón en forma de diamante cuando el punto de partida y el espacio del conjunto hay dos formas:
Use el método de tres puntos para configurar: el método de tres puntos se ha configurado para calcular automáticamente el desplazamiento y la distancia de los tres puntos.
El primer paso, en el estado manual, haga clic en el botón “conjunto de métodos de tres puntos” para ingresar a la página de edición que se muestra a continuación.

En el segundo paso, mueva el robot a la posición inicial de la pila y luego haga clic en el botón [Establecer] para establecer el valor de la coordenada actual en el cuadro de edición de coordenadas de cada eje.
En el tercer paso, mueva el manipulador al siguiente punto en la dirección del eje X1 y luego haga clic en el botón [Establecer] para establecer el valor de la coordenada en el cuadro de edición de las coordenadas X1, Y1. Luego mueva el robot al siguiente punto en la dirección del eje Y1 y luego haga clic en el botón [Establecer] para establecer el valor de la coordenada en el cuadro de edición de las coordenadas X1, Y1.
Paso 4 Haga clic en el botón [OK] para volver a la página anterior para otras configuraciones.
Sin usar el método de tres puntos: calcule manualmente la distancia de compensación y el espacio del eje.
En el primer paso, ingrese a la interfaz como se muestra en la figura a continuación. Mueva el robot al punto de inicio de apilamiento manualmente y luego haga clic en el botón [Establecer] para establecer el valor de coordenadas actual en el cuadro de edición de coordenadas de cada eje.
En el segundo paso, mida manualmente la distancia y el desplazamiento entre puntos en cada eje y edite los valores de espacio y desplazamiento en los cuadros de ediciones correspondientes.
El tercer paso es establecer la dirección de apilamiento de cada eje, y la dirección positiva se refiere a la dirección de la posición del eje + (presione la tecla del eje en el controlador manual para identificar) la inversa se refiere a la dirección de la posición del eje.
Mapa de efecto de desplazamiento X, Y:
El efecto del desplazamiento X se muestra a continuación, con la izquierda sin sesgo y la derecha desplazada por el desplazamiento X.
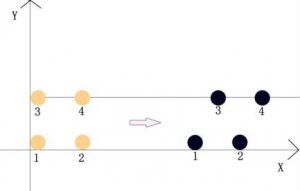
Antes imparcial Después de la compensación
El efecto de la compensación Y se muestra a continuación, con la izquierda sin sesgo y la derecha desplazada por la compensación X.
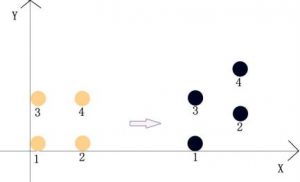
Punto inicial de pilote inclinado, modo de ajuste de paso:
El primer paso es mover el manipulador a la posición de inicio de la pila manualmente y luego hacer clic en el botón [Establecer] para establecer el valor de la coordenada actual en el cuadro de edición de coordenadas para cada eje.
En el segundo paso, establezca la distancia de desplazamiento en la dirección Z (el valor predeterminado es Z en la dirección X). Si desea desplazar Z en la dirección Y, marque la opción [Desplazamiento de dirección YZ].
El tercer paso, estableció la dirección de apilamiento, cuente, ordene, contrarreste y ejecute el pedido.
Dirección: Dirección, dirección de la posición del eje +, dirección del eje menos, dirección del eje.
Recuento: establece el número de puntos que se apilarán en el eje.
Secuencia de ejecución: establece el orden en que se apila cada eje.
Selección de contador: “auto” significa que el programa ejecuta un modo, el contador predeterminado del sistema se ha incrementado en 1; contador personalizado (en el menú de acción → [contador] para configurar).
El cuarto paso, edite los datos y haga clic en el botón [Guardar].
El quinto paso, jugar √ “usando la pila” en la “pila” en la elección de usar la pila, y establecer la velocidad de apilamiento, elija una buena ubicación en el programa, haga clic en “Configuración” para editar la pila para enseñar.
El sexto paso, si utiliza un contador personalizado para ser insertado en el proceso de enseñar el contador de pila más 1 o el contador no cuenta.